

What You’ll Learn 🎯
Understand and apply Frequency Response Function (FRF) concepts using DewesoftX
Set up and run modal tests with impact hammers and shakers (SISO, SIMO, MIMO configurations)
Configure trigger, windowing, averaging, and coherence measurement for clean FRF data
Build and animate modal geometry, import CAD files, and visualize mode shapes
Perform SDOF fitting (modal circle) for lightly damped, well-separated resonances
Proceed to MDOF modal analysis for complex or heavily damped systems
Estimate modal parameters: natural frequencies, damping ratios, mode shapes
Validate and export modal models (UNV/ UFF formats) for further use in simulation tools
Course overview
This FRF Modal Testing & Modal Analysis course equips engineers and test professionals with hands‑on skills to confidently perform experimental modal analysis using DewesoftX. Starting with fundamental concepts—like FFT‑based Frequency Response Functions and transfer functions—you’ll learn how to excite structures via impact hammer or shaker, set up signal acquisition (triggers, averaging, coherence), and capture high‑quality FRF data.
Next, you’ll define structural geometry within DewesoftX, place excitation and response points, and animate mode shapes to visualize structural dynamics. The course then teaches structured parameter identification: use the modal circle for SDOF systems, and when faced with closely spaced modes or heavy damping, apply multi‑degree‑of‑freedom (MDOF) fitting via the Modal Analysis module to extract natural frequencies, damping ratios, and mode shapes.
Finally, this training walks you through validating and exporting modal models in industry-standard formats (UNV/ UFF) for integration into CAE tools. From acquiring FRF data to building accurate modal models, this course delivers a complete workflow for structural dynamic testing and analysis with DewesoftX.
What is frequency response function - FRF
The frequency response function H(f) in the frequency domain and the impulse response function h(t) in the time domain are used to describe the input-output (force-response) relationships of any system, where the signals a(t) and b(t) represent the input and output of the physical system, respectively. The system is assumed to be linear and time-invariant.
The frequency response function and impulse response function are known as system descriptors, meaning they are independent of the specific input and output signals involved.


In the table below, you can see typical formulations of frequency response functions:
| Dynamic stiffness | Force / Displacement |
| Receptance | Displacement / Force |
| Impedance | Force / Velocity |
| Mobility | Velocity / Force |
| Dynamic inertia | Force / Acceleration |
| Accelerance | Acceleration / Force |
The estimation of the frequency response function depends on transforming data from the time domain to the frequency domain. This computation is performed using the Fast Fourier Transform (FFT) algorithm, which operates on a limited time history. The resulting frequency response functions satisfy the following single- and multiple-input relationships:
Single input relationship
Xp represents the spectrum of the output, Fp is the spectrum of the input, and Hpq is the frequency response function.
Multiple input relationship
In the image below, we can see an example of a two-input, two-output case.


Modal test and modal analysis in DewesoftX software
Modal testing and analysis are used to determine structural modal parameters such as natural frequencies, damping ratios, and mode shapes. Measured excitation and response data (or only response data) are utilized in modal analysis, followed by dynamic signal analysis and modal parameter identification. Modal test and analysis techniques have been developed over more than three decades, with significant advancements made during this time. These techniques have been widely applied in engineering fields such as dynamic design, manufacturing and maintenance, vibration and noise reduction, vibration control, condition monitoring, fault detection, model updating, and model validation.
Modal testing and analysis are essential in modern engineering. The measurement of system parameters—known as modal parameters—is crucial for predicting structural behavior.
These parameters are also necessary for building accurate mathematical models. Experimentally measured values such as resonance frequency, structural damping, and mode shapes are calculated during the process.
The Dewesoft Modal Test module is used to perform structural dynamic measurements. It provides calculated Frequency Response Functions (FRFs), including amplitude and phase, over a defined frequency range.
The Dewesoft Modal Analysis module is used after data acquisition from the Modal Test to estimate high-quality modal models. This module takes results from the Modal Test (e.g., FRFs) and estimates modal parameters such as resonance frequencies, damping ratios, and mode shapes.
While the Dewesoft Modal Test module also offers tools to estimate modal parameters, these are most suitable for simple structures that are lightly damped and have well-separated modes.
For complex structures—those with closely spaced resonance frequencies or heavy damping—the Dewesoft Modal Analysis module is required for valid modal parameter estimation.
The Dewesoft Modal Test module is included in the DewesoftX DSA package (alongside other modules such as Order Tracking, Torsional Vibration, etc.). However, the Dewesoft Modal Analysis module is licensed separately and is not included in the DSA package.
Thanks to the compact and portable design of Dewesoft data acquisition instruments (e.g., DEWE-43, SIRIUSi), they serve as ideal mobile solutions for technical consultants involved in failure detection and diagnostics.
Suppose a mechanical structure needs to be analyzed. Where are the resonances? Which frequencies might cause problems and should be avoided? How can these be measured, and how can measurement quality be ensured?
One of the simplest approaches is to excite the structure using a modal hammer (for force input) and measure the response using acceleration sensors. First, the structure is graphically defined in the geometry editor.
Then, excitation and response points are selected and linked to the defined geometry. During the test, the user taps on the test points while the software collects the data. In addition to extracting phase and amplitude, the structure can also be animated at the frequencies of interest. Coherence is used as a measure of data quality. The modal circle display widget allows for higher precision in frequency and damping factor estimation on simple structures.
For more complex analyses, or when working with complex structures, users continue with the Modal Analysis module.
If needed, data can be exported to several formats, including the widely used UNV format.



LTI - linear, time-invariant systems
First, we must assume that the methods described here apply to LTI (Linear Time-Invariant) systems, or systems that closely approximate LTI behavior. LTI systems—common in applied mathematics and widely used across various technical fields—exhibit the following characteristics:
Linearity: the relationship between input and output is a linear map (scaled and summed functions at the input will also exist at the output but with different scaling factors)
Time-invariant: whether an input is applied to the system now or any time later, it will be identical
Furthermore, a fundamental result in LTI system theory is that any LTI system can be completely characterized by a single function known as the system’s impulse response. The output of the system is obtained by convolving the input signal with the system’s impulse response.


What is transfer function
Transfer functions are widely used in the analysis of systems and the main types are:
mechanical - excite the structure with a modal hammer or modal shaker and measure the input force excitation together with the output responses from e.g. accelerometer sensors.
electrical - apply a voltage to the circuit on the input, measure the voltage on the output
For example, in mechanical structures, transfer characteristics can reveal dangerous resonances. Frequency ranges where material stress becomes excessively high must be avoided—typically by defining a restricted operating range. A simplified process works as follows: an input signal x(t) is applied to the system and measured along with the output signal y(t). The ratio of the output to the input in the frequency domain essentially yields the transfer function:


The Laplace transformation yields the result in the frequency domain:

In the picture below, we can see a diagram of the Laplace transform, which is often interpreted as a transformation from the time domain (where inputs and outputs are functions of time) to the frequency domain (where inputs and outputs are functions of complex angular frequency, expressed in radians per unit time). Given a simple mathematical or functional description of an input or output in a system, the Laplace transform offers an alternative functional representation that often simplifies the analysis of the system's behavior or the synthesis of a new system based on specific design requirements.


How to obtain the transfer function
Mechanical structure
Excite the structure with modal hammer or shaker (measure force)
Measure the response with accelerometers (acceleration)
Electrical circuit
Apply a voltage to the circuit on the input and measure it.
Measure the voltage on the output of the circuit
Calculate the transfer function between the measured input and output of the system.
Calculate the coherence function. A coherence value of 1 indicates that the measured response is entirely caused by the measured input. If the coherence is less than 1 at any frequency, it indicates that the measured response is not solely caused by the measured input but also influenced by additional factors such as noise sources.
Enabling and adding modal test in DewesoftX
To get started with modal testing and analysis, add the Modal Test and (optionally) the Modal Analysis modules, as shown in the image below:


This training material will begin by focusing on the Modal Test section, and we will return to the Modal Analysis section later.
When you add the Modal Test module, the following setup screen will appear:


Test methods
Depending on the application, Dewesoft offers three different test methods:
Impact Hammer -The structure is excited by impacts, e.g., from a modal hammer.
Shaker - The structure is excited by one or multiple modal shakers. The shaker signals can be provided by either Dewesoft AO channels or other external sources.
ODS - This method does not use external excitations, but instead relies on excitations generated by the structure during operation. Only output response channels are measured. ODS is used to animate structural deflection shapes, but it does not provide a modal model like those obtained with the Impact Hammer or Shaker test methods.
Impact hammer test, triggered FRF
A modal test method that is relatively easy to configure involves using a modal hammer. The hammer excites the structure with a short impulse, providing broadband frequency excitation, while one or more acceleration sensors measure the response.
The hammer includes an integrated force sensor and features interchangeable tips with varying stiffness. Depending on the tip used, the frequency bandwidth typically ranges from approximately 0.5 kHz to 3 kHz. For larger structures, heavier hammers with more mass are available to generate higher excitation amplitudes.




The two pictures below show a comparison. The scopes at the top display the time domain, while the FFT plots below represent the frequency domain (using the same scaling).




When the calculation type is set to Impact Hammer, the setup will appear as shown below.
In the Excitation tab, specify the Node IDs where the hammer impacts will occur. In the Response tab, define the responses using acceleration sensors, specifying the Node IDs where they will be located. In the example below, the two analog channels are labeled Modal Hammer and Acc 1.




FRF channel setup inside Dewesoft data acquisition software
Trigger parameters
Let's perform a short measurement to explain all the parameters. The structure will be struck once, and the resulting signals will be recorded.


The hammer signal (upper, blue line) displays a clean impact with high damping, while the response signal (lower, red line) exhibits oscillations that gradually fade out.
Trigger level
The Modal Test module requires a start criterion when operating in triggered mode, such as when using the Impact Hammer method. Therefore, a trigger level—e.g., 100 N—must be specified. Each time the input signal exceeds this trigger level, the FRF calculation (FFT window) will be initiated.


Double hit detection
However, when the input signal contains multiple impulses from a single hit (so-called double hits), DewesoftX can detect this if a double-hit threshold is specified. If the signal crosses this threshold shortly after the initial trigger event, a warning message will appear, prompting you to repeat the measurement.


Overload level
You can also enable a warning which will be displayed when the hammer impact has exceeded a certain overload level - when the hit was too strong.


The following image summarizes the different trigger level options.


Now that the trigger condition has been defined, we need to ensure that the FRF calculation encompasses the entire signal in order to achieve accurate results.
Window length
Let's assume the sample rate in our example is 10,000 Hz, and we have set 8,192 lines in the FRF setup.
According to the Nyquist theorem, we can only measure frequencies up to half the sample rate (5,000 Hz). In other words, we need at least two samples per frequency line. Therefore, our spectral line resolution is:
The total FFT window calculation time (block length T) is:


Below, you can see a cutout section of the excitation and response signals, which covers nearly the entire signal duration.
Note: The x-axis does not start at 0 but is scaled in samples from -819 to 15,565 due to the pre-trigger settings. In total, this gives 16,384 samples for each FFT time block.


Pre-trigger
The pre-trigger time defines how much data prior to the trigger threshold should be included in the FFT blocks. From the screenshot above, you can see that 5% of 16,384 samples equals 819 samples, which corresponds to:
t<sub>pre</sub> = 819 × (1 / 10,000 Hz) = 81.9 ms
The trigger event occurs at sample 0.


Modal test data acquisition system overview
In most cases, acceleration sensors, microphones, modal hammers, or other force transducers are used for analog input. If they are, for example, voltage or ICP/IEPE type, they can be connected directly to the ACC amplifier of the SIRIUS data acquisition system, or to DEWE-43/MINITAUR DAQ systems using the Dewesoft smart sensor interface DSI adapter (DSI-ACC).
When analog output is needed (e.g., for shaker control), the SIRIUS analog output option—featuring 8 channels with BNC connectors on the rear side of the SIRIUS DAQ system—provides a fully featured arbitrary function generator.


Auto-generated visual displays
For an easier start, Dewesoft offers auto-generated displays that include the most commonly used instruments, arranged logically based on the type of application.
Dewesoft automatically creates five auto-generated displays: one for pre-test, three for measurements (one for each test method), and one for analysis.
You should select the visual measurement display that corresponds to the test method selected in the Modal Test (MT) setup.




Information and Control section
At the upper left, you will find display widgets and control buttons used to manage the selected test method. Clear indicators show the time data storage state and provide information about the measurement status for the currently selected sensor groups. You also have the option to re-do the measurement for the current sensor groups, select which group of Node IDs should be measured, and view a progress table for the FRF functions being determined.
Geometry section
At the lower left, you will find the Geometry widget, which by default displays the geometry created or imported under the MT Setup → Geometry tab.
Excitation and response signal section
At the upper right, the currently selected excitation and response channels are displayed in 2D graph widgets, shown in both the time and frequency domains (time scopes and FFT spectra).
FRF and coherence section
At the lower right, you will see 2D graphs showing the Frequency Response Functions (FRF) and Coherence Functions (COH).
Depending on the selected test method, the display widgets and controls will adapt to best fit the configured test. As a result, all five predefined visual displays may differ.
If changes are made to the setup later, remember to rebuild the visual display to reflect the latest configuration. You can do this by right-clicking the MT display icon and selecting Re-build, as shown below:


Modal test info channels
There are additional channels provided by the FRF module that offer status information during the measurement. To display these channels, please add a Discrete Display in Design Mode:


The channels ‘Hit Status’ and ‘OVLChannel’ can be assigned to this display.
Note: OVLChannel will only be available if the parameter “Show message if excitation exceeds” has been enabled under the MT Setup section beforehand.


FRF control channels
During roving excitation or roving response measurements, after one group of Node IDs is measured, you can continue to the next group of Node IDs by pressing the Next group buttons.
If you are unsatisfied with the last measurement, you can cancel it by using Reject last.
If all measurements in a group must be re-measured, the Reset Group button can delete all the calculated data done for the current group of Node IDs at once.
All actions are performed using control channels in Dewesoft. If you want to create your own custom visual display, these controls can be manually configured by selecting the Input Control Display from the Instrument Toolbar. Set the control type to Control Channel and Push-button.
You can then assign the channels Reject Last, Next Point, and Reset Point from the Channel List on the right.


Trigger window functions and averaging
Force and force + exponential windows
When using triggered test methods such as impact hammer or shaker bursts, you can choose between two window types: Force and Force + Exponential.
The Window Length parameter affects only the excitation channels, as the response channels always use a window that spans the full FFT block length (T).
The Window Decay parameter is used specifically for the Force + Exponential window type and defines the remaining relative amplitude at the end of the FFT block length.


Force window
A Force Window is a rectangular window with a specific length relative to the FFT block length (T).
For excitation channels, the window length can be adjusted or reduced to include only a portion of the FFT block duration, or it can be set to use the full 100% of T. In our example, where the damping is very high (i.e., the signal fades out quickly), we can select a shorter portion of the signal—e.g., 10%—based on a predefined noise level threshold. Setting the window length to 100% means that the entire acquired signal will be used for the calculation (in our earlier example, this would mean all 16,384 samples of the FFT block are utilized).
The response signals will always use a window length of 100% of the FFT block length T.


Outside the Force window length, the excitation signals will be completely cut off to avoid noise.
Force + exponential window
A Force + Exponential window applies an exponential decay to the excitation channels, with the decay beginning at the point defined by the Window length. After this defined length, the exponential window drops to zero for the excitation signals.
The response channels will receive an exponential window applied over the full FFT block length (T), regardless of the specified Window length.
For both excitation and response channels, the Window decay percentage is relative to the total FFT block length (T).
The Force + Exponential window is commonly used for impact testing because it reduces noise in both excitation and response channels. Additionally, it ensures equal decay ratios between the excitation and response signals within the defined Window length, eliminating the need for further window correction.
The image below illustrates how the response window decays based on different Window decay percentages selected in Dewesoft.


Averaging of spectra
The results can be improved by averaging the excitation and response spectra over multiple FFT blocks. For example, during a Hammer Impact test, the first five hits (or as specified) will be recognized and used to calculate the resulting averaged spectra. Once the defined number of spectra have been averaged, the system will proceed to the next group of Node IDs.




Impact hammer, roving excitation sensor
Roving hammer SISO modal test


In this mode of operation, a single acceleration sensor is mounted at a fixed position on the structure. The modal hammer is then moved across the excitation DOF points—for example, performing five hits at each point, which are subsequently averaged. This is likely the simplest form of modal testing and requires only one hammer and one response sensor. This approach, using a single input excitation and a single output response, is referred to as SISO testing (Single Input, Single Output).


Roving hammer SIMO modal test
If not all structural modes can be detected using a single reference DOF (Node ID, Direction, and Sign), then two or more response sensors can be used simultaneously at fixed reference DOFs while the modal hammer is roving. This method is also referred to as MRIT — Multiple Reference Impact Testing.
Using a single input excitation and multiple output responses is known as SIMO testing — Single Input, Multiple Output testing.




Impact hammer, roving acceleration sensor
Roving response SISO modal test


The hammer always excites the structure at the same DOF position (Node ID, Direction, and Sign). In this setup, the acceleration sensor is moved to different DOFs. A disadvantage of this approach is that the mass of the acceleration sensor alters the structure differently at each point, thereby influencing the measurement — a phenomenon known as mass loading. Additionally, the sensor must be re-mounted for each measurement, which involves more effort compared to a roving hammer setup.
An advantage of using roving response testing is that it can be useful when it is difficult to impact the structure at all DOFs.
Using a single input excitation and a single output response is referred to as SISO testing. If multiple output responses are used (for example, in a roving group), it is referred to as SIMO testing.


Shaker
Modal shakers are a type of vibration shaker used to excite large or complex structures and obtain high-quality modal data. Compared to modal hammers, modal shakers can excite a structure over a broader frequency range and with various signal types, making them ideal for different structural characteristics and more accurate test results. Shaker tests are typically employed for critical structures or when extended analysis is required. These tests often involve a large group of response sensors.

 and three response sensors")
TThe channel setup for a SIMO shaker modal test is shown below:


MIMO shaker setup


The channel setup for a MIMO shaker modal test is shown below:


Shaker externally controlled
If the shaker is externally controlled, Dewesoft offers two options: Burst Mode (triggered acquisition) and Continuous Mode (free-run acquisition).


Continuous shaker excitation type
In Continuous Mode, spectra are calculated continuously as data are acquired throughout the measurement. A list of time-weighting FFT windows for continuous signals is supported, and the calculated spectra can overlap in time by specifying the Signal Overlap parameter.


The calculation runs until the end of the measurement, but it can also be stopped automatically after a user-defined number of spectra by enabling the ‘Stop After’ parameter under the FRF settings and specifying the desired number of averages.
Burst shaker excitation type
In Burst mode, the calculation of each spectrum is triggered by an externally controlled excitation signal. When the excitation input signal exceeds the trigger level, a new spectrum is calculated. Depending on the ramp-up burst time, a pre-trigger can be adjusted to ensure that the FFT block of time samples used for the spectrum includes the entire burst.


Time window functions for burst random signals are supported, along with related user-defined window parameters. With triggered spectrum calculation, signal overlap is disabled because it is controlled by the trigger.
Shaker controlled by Dewesoft analog output
If the shaker is controlled using Dewesoft AO, we support continuous random, burst random, and sine sweep generator output excitation signals. AO stands for Analog Output. All function generator settings can be configured directly in the Modal Test setup.


For all waveform types, the AO soft start and soft stop times can be configured. These soft start/stop times define the duration of half-sine leading and trailing gain tapers. Measurements will be calculated after the leading taper and before the trailing taper—except for triggered calculations when using burst random.
In the Excitation Channels table, the Dewesoft AO channels to be used must be selected, and their target output voltage amplitudes must be specified. The Dewesoft output channels will maintain the defined voltage amplitude across all frequencies.
Continuous random waveform
By selecting the Waveform Type: Continuous Random, the AO channels will output continuous random noise. This random noise will have a frequency bandwidth equal to the Nyquist frequency of the DAQ device’s sample rate, where the Nyquist frequency is defined as:
Burst random waveform
With the Burst Random waveform type, the AO channels will output bursts of random signals with a user-defined burst length. This burst length—occurring between the AO soft start and stop times—is set by the Excitation Duration parameter. The excitation duration is specified as a percentage of the FFT time block length used for each spectrum:


Note: To minimize spectral leakage, ensure the Excitation Duration is short enough to leave room for the AO soft start and stop times within the FFT time block. Additionally, make sure the Pre-trigger is configured so that the FFT time block captures the entire burst—from the beginning of the AO soft start to the end of the AO soft stop.

 start after pre-trigger, (2) ramp-up over start time, (3) run over the excitation duration, (4) ramp-down over the stop time. The total duration should not exceed the FFT block duration")


Sine sweep waveform
The Sine Sweep waveform outputs a sinusoidal signal that sweeps in frequency from the Start Frequency to the Stop Frequency over a specified Sweep Time or at a defined Sweep Rate. The frequency sweep begins after the AO soft start time and ends before the AO soft stop time.
Swept sine testing typically provides excellent coherence between input and output. Additionally, the total input force applied to the structure can remain relatively low, as only one frequency is excited at a time.


When using Sine Sweep with multiple shakers, multiple sinusoidal sweeps must be performed to uncorrelate the input excitation signals. To distinguish between the multiple excitation sources, the excitation pattern must vary between sweep runs.
In Dewesoft, this is managed by modifying the phase pattern for the AO channels between sweeps. Each sweep run is assigned a phase profile that defines the phase of each AO channel. These profiles can either be randomized by pressing the "Randomize Profiles" button, or manually configured in the Excitation Channels table.
To successfully uncorrelate the excitation signals, the number of sweep runs must be at least equal to the number of AO channels used. The phase profiles for each sweep should differ as much as possible to ensure optimal results.
For example, if two AO channels are used, ideal phase profiles might be:Run 1: 0° and 0° andRun 2: 0° and 180°
The measurements are averaged across all sweep runs, meaning data from each phase profile contributes to the final spectral results.


No phase profiles need to be configured for random waveform types, as the excitation patterns between AO channels vary naturally due to the independent noise signals.
Ensure that the sweep is sufficiently slow, since the FFT requires a specific time T for calculation, which depends on the number of lines and the desired resolution. The settings for Dewesoft AO signals are the same as those used in the Function Generator module.
When you switch to Measure mode or press the Store button, the sweep will begin.


When using a sine sweep, the graph data updates continuously as the sweep progresses through the frequency range. Displaying the AO/Freq channel in a separate window is an effective way to show the current frequency.


The picture above shows two 2D graph instruments displaying transfer functions 2–1 and 3–1, with amplitude on the top and phase below, during a sweep. The left side has already been calculated, while the right side is still in progress.
ODS - operating deflection shapes
Operating Deflection Shapes (ODS) provide a straightforward method for performing dynamic analysis and visualizing how a machine or structure behaves under actual operating conditions. ODS testing does not involve any applied artificial forces—only the response vibration signals are measured.
Dewesoft supports two types of ODS:
Time ODS - used by adding a separate Time ODS module to your DewesoftX setup.
Frequency ODS - included in the Modal Test module as one of the Test methods.
Time ODS calculates deflection shapes over the time axis, whereas Frequency ODS calculates deflection shapes over the frequency axis.
With Time ODS, you can observe how the entire structure deflects at a specific moment in time. In contrast, Frequency ODS shows how the structure deflects at a specific frequency.
Time ODS
The Time ODS module can be added to the setup file as shown in the picture below:


In the Time ODS setup, you can select vibration channels as inputs—these can be acceleration, velocity, or displacement channels. You can also integrate or differentiate them to obtain, for example, displacement as the output quantity. The geometry can be created in the same way as in the Modal Test (MT) module.


For more information about Time ODS, please refer to the following links:
Time ODS Online Help
Modal Test and Analysis Manual - Time ODS section
Frequency ODS
When performing Frequency ODS, one of the accelerometers must be set as a reference channel in order to calculate phase information. In Dewesoft, this is done by selecting the reference response sensor as an excitation channel. The reference channel should be positioned at the degree of freedom (DOF) that reveals the most structural modes.


If you want to group your sensors and move them during the measurement, select the Roving Response option.
This will create different groups, and you can manually assign sensors to each group or rename the groups as needed.


During the measurement, you can switch between the groups:


EMA - experimental modal analysis
In Experimental Modal Analysis (EMA), structures are excited by artificial forces, and both the inputs (excitation) and outputs (response) are measured to obtain Frequency Response Functions (FRFs) or Impulse Response Functions (IRFs) through digital signal processing. Modal parameters can be identified from FRFs or IRFs using identification algorithms in either the frequency domain or the time domain. EMA tests are typically conducted in a laboratory environment, offering the advantages of a high Signal-to-Noise Ratio (SNR) and the flexibility to easily change the test setup.
EMA identification methods can be classified into time-domain (TD) methods and frequency-domain (FD) methods, depending on the domain used for identification. Additionally, they can be categorized based on the number of input and output channels:
SISO (single input single output),
SIMO (single input multiple outputs),
MIMO (multiple inputs multiple outputs).
The Frequency Response Function (FRF) is commonly used in Experimental Modal Analysis (EMA) within the frequency domain. It is estimated from both excitation and response signals. Modal parameters are then identified by constructing parametric or nonparametric models of the FRF and applying curve-fitting techniques.
The Impulse Response Function (IRF) is typically used for EMA in the time domain and can be derived by performing the inverse Fast Fourier Transform (FFT) of the FRF.
Time-domain methods are well-suited for global analysis across a broad frequency range and generally offer good numerical stability. However, they also have certain limitations:
very difficult to confirm the order of math model,
always time-consuming,
many calculation modes got with the structural modes and difficult to delete them,
many settings needed, complicated-to-use,
not being able to take into account the influence of out-band modes.
On the other hand, frequency domain methods are widely used because they are reliable, fast, easy to use, and capable of accounting for out-of-band modes and analyzing unevenly spaced FRFs.
OMA - operational modal analysis
Operational modal analysis (OMA) is used for large civil engineering structures, operating machinery, or other systems where only the output response is available. These structures are typically subjected to natural loads that are difficult to control or measure—such as wave loads on offshore platforms, wind loads on buildings, or traffic loads on bridges.
While both OMA and Operational Deflection Shapes (ODS) use only output response channels, ODS is primarily used to visualize deflection shapes for animation purposes. In contrast, OMA delivers a full modal model, similar to Experimental Modal Analysis (EMA), providing resonance frequencies, damping ratios, and mode shapes for both simple and complex structures.
When feasible, EMA is generally preferred over OMA because it offers a controlled testing environment where excitations can be managed by the operator. However, in situations where artificial excitation is impractical or impossible, OMA becomes a valuable alternative. Additionally, because OMA captures the structure’s true dynamic behavior during normal operation, it is especially well-suited for health monitoring and damage detection in large-scale structures.
MIMO - multiple shaker excitation
Multiple-Input Multiple-Output (MIMO) measurement techniques are well-proven and widely established methods for collecting Frequency Response Function (FRF) data sets. MIMO methods offer distinct advantages in measuring and extracting basic modal parameters, particularly when testing larger structures.
The primary advantage of MIMO is that the input-force energy is distributed across multiple locations on the structure. This results in a more uniform vibration response—especially beneficial for large, complex, or heavily damped structures. In such cases, relying on a single shaker often leads to overdriving the excitation Degree of Freedom (DOF) to achieve sufficient vibration energy, which can introduce non-linear behavior and degrade the quality of the FRF estimations. Applying excitation at multiple locations generally yields a more accurate representation of the forces the structure experiences during real-life operation.
The response transducers must be roved unless enough are available to cover all the response DOFs simultaneously. In MIMO testing, uncorrelated random signals—such as continuous, burst, or periodic random—are typically used for excitation. Among these, burst and periodic random signals offer the advantage of producing leakage-free FRF estimates (i.e., without resolution-bias errors), which is an improvement over continuous random signals.
As a demonstration, a test was performed on a model airplane structure. Two shakers, driven by uncorrelated excitation signals, were used to excite the structure. Responses were captured using tri-axial accelerometers, while the excitation signals were monitored via force transducers. The voltage signals for the shakers were generated using the Dewesoft Function Generator (AO module).


On the left side of the Modal Test user interface (UI), select Shaker as the test method, specify the resolution of the measurement, and configure any additional output channels as needed.
On the right side of the UI, define the excitation source and excitation channels. In this example, we will use Dewesoft AO to drive the shakers and select Burst Random Noise as the excitation type.
Excitation will be measured using two force transducers positioned in the Z+ direction, located at points 1 and 2.


We measured the responses using four tri-axial accelerometers in the X, Y, and Z directions (at points 1, 2, 4, and 5), and two uni-axial accelerometers in the Z direction (at points 3 and 6). The setup was configured accordingly, as shown in the image below.

In the time-domain recorder (top right corner), you can see the time-domain signals from both the excitation and the response channels.
On the left side, the results are displayed using 2D graphs, showing transfer functions, coherences, and Mode Indicator Functions (MIFs). The geometry is animated based on the selected frequency.


Transfer functions setup tab
The Transfer Functions tab provides an overview of which transfer functions will be calculated. For large test setups involving many sensor locations and multiple reference points, the complete set of transfer functions can be extensive. If not all transfer functions are needed during measurement, they can be toggled from “Used” to “Unused” to improve performance.
In Analyze mode, during post-analysis, the “Unused” transfer functions can be toggled back to “Used”, allowing recalculations based on the acquired time data.


Geometry editor setup tab
Under the Geometry Editor tab, you can create or import a geometry related to the test. The geometry is mapped to the channels using Node IDs. After all nodes are connected to their corresponding channels, the geometry can be used to animate mode shapes and deflection shapes, depending on the selected test method.
For additional information on how to use the Geometry Editor, please refer to:
Geometry online help page
Modal test and analysis manual


The geometry can be managed in the Modal Test setup under the Geometry Editor tab, or in Measure mode by adding the Modal Geometry widget.
When the Geometry Editor tab is used within the Modal Test setup, the geometry is automatically displayed on the predefined Measure displays for Modal Testing.


Importing geometries
You can import UNV / UFF (Universal File Format) geometries from other software (e.g., MEScope or Femap) into DewesoftX. Of course, you can also import a geometry previously created in DewesoftX’s FRF Editor. Additionally, you can use Load to open geometries from XML files.
In the Geometry tab of the Modal Test setup, or through the properties of the Modal Geometry widget on the left, select Load or Import.


Drawing a structure
To draw a structure go to the Geometry editor tab in the Modal Test setup. In the editor we can add Objects, Nodes, Lines and Surfaces. All the points and objects can individually be defined in a Cartesian coordinate system or Cylindrical coordinate system.


Objects
The structure can be assembled from pre-defined objects. The objects available in the Geometry Editor are:
Cuboid
Plate
Circle
Sphere
Cylinder
Cone
For each object, you can define the position (X, Y, and Z coordinates), size (along each axis), and the number of points on each axis. If the Surfaces option is selected, surfaces will automatically be assigned to the structure.




Nodes
Under the Nodes tab in the Geometry Editor, you can link the channels used in the setup to the geometry. The setup channel Node ID numbers are matched to the corresponding geometry Node ID numbers. Nodes represent the points where sensors are positioned on the object.
Each node is defined by its location (X, Y, Z) and its rotation around the axes (X angle, Y angle, Z angle). To create a new structure from nodes, switch to the Nodes tab. First, define a coordinate system—either Cartesian or Cylindrical—within which the nodes will be positioned. Once the coordinate system is established, you can add nodes using the Plus button.
After nodes are created, you can adjust their rotation (to reflect the actual sensor orientation on the object) along all three axes. Nodes can be selected either by clicking in the node table or by right-clicking on the structure preview window. When a node is selected, its rotation is displayed using a small coordinate system directly at the node’s position. The image below shows a selected and rotated node.


Lines
Once the nodes are defined, we can proceed to manually add lines to connect them. An easy way to create lines is to right-click on a node, then select Add → Lines.


Left-click on the first node and move the cursor to the second node. This will display a white line, which turns green when you hover over the second node. Click the second node to complete the line. You can continue adding multiple lines consecutively. Right-clicking will stop the line-drawing process.
If you prefer not to draw connected lines visually, you can also manually add lines by clicking the Plus button in the Lines tab of the Geometry Editor.
Surfaces
A surface can be defined using three nodes. Triangular surfaces can be added by right-clicking on a node and selecting Add → Triangles.


Alternatively, triangle surfaces can be added manually by clicking the Plus button and defining the corner nodes directly.
Cartesian coordinates
Nodes are usually represented using a Cartesian coordinate system, which includes X, Y, and Z positions along with rotation around all three axes. The coordinate system can also be used for grouping nodes, allowing you to later rotate or translate them around a defined center point.
Cylindrical coordinates
The cylindrical coordinate system is used to simplify the creation of round objects. Points are defined by a radius, angle, and Z (height) relative to the coordinate system’s center point. Cartesian and cylindrical coordinate systems can be combined within a single geometry.
Importing a CAD file into DewesoftX geometry editor
When importing a more complex geometry into DewesoftX's FRF Geometry Editor, the number of nodes can be very large. If you're using CAD software that does not support exporting to UNV format or does not allow reduction in the number of node points, you can use a free converter such as GMSH to convert STL files to UNV. GMSH is available at: http://geuz.org/gmsh/.
After downloading and opening the program, you can load any STL file.


The geometry will be displayed in GMSH.


Click Save As, choose the *.unv file format, and rename the file with a .unv extension.


Then, import the geometry into DewesoftX as described on the previous page.
All nodes and triangles are defined in the .unv file format.


The geometry is now ready to be used for modal animation.


FRF - frequency response function
For the following explanation of parameters, a triggered Frequency Response Function (FRF) test was performed on a snowboard structure. All 39 excitation points were sequentially struck with a modal hammer and are associated with a single reference response accelerometer.
Only one hammer and one sensor were used.
From the channel list on the right side, we can see that each excitation point (#1, #2, #3, #4, etc.) is referenced to the same point (#1). For each excitation point, a transfer function was calculated—for example, TF_1Z+/3Z+.


FRF functions consist of amplitude and phase information, or real and imaginary components, over a defined frequency range. The 2D graph widget is used for visualization. You can select the desired display format by adjusting the properties on the left side.


To create a Bode plot, use two 2D graphs placed one below the other. The upper graph displays the amplitude (y-axis type: LOG), while the lower graph shows the phase (y-axis type: LIN).
When the amplitude of the transfer function exhibits a local maximum and the phase shifts by approximately 90 degrees at the same point, this typically indicates a resonance. However, to avoid incorrect conclusions, additional parameters should also be evaluated.


Coherence
Coherence is used to evaluate the correlation between the output and input spectra. It provides insight into the power transfer between the input and output of a linear system. Simply put, it shows how closely the input and output signals are related.
The amplitude of coherence ranges from 0 to 1. Low values indicate a weak relationship between the input and output channels—possibly due to noise or gaps in the excitation spectrum at certain frequencies. Values close to 1 suggest a strong correlation and reliable measurements.
Note: Coherence values must be based on averaged measurements. If no averaging is used, the coherence will falsely display a value of 1, which is incorrect.
If the transfer function exhibits a peak but the coherence is low (as shown by the orange circles in the image below), this may not indicate a true resonance. In such cases, it might be necessary to repeat the measurement (e.g., using a different hammer tip), or refer to the Mode Indicator Function (MIF) parameter described below.
Coherence is calculated over the frequency range and is typically visualized using a 2D graph widget. Separate coherence channels are generated for each point (e.g., Coherence_3Z/1Z, Coherence_4Z/1Z, etc.).


The coherence function indicates the degree of a linear relationship between two signals as a function of frequency. It is defined using two autospectra (G<sub>AA</sub>, G<sub>BB</sub>) and a cross-spectrum (G<sub>AB</sub>) as follows:
For more information about autospectra and cross-spectra, please refer to:
FFT Analysis Pro-training, Auto- and Cross-spectra
FFT Analysis Ultimate guide, FFT Results
At each frequency, coherence can be interpreted as the squared correlation coefficient, which expresses the strength of the linear relationship between two variables. In this context, the magnitudes of the autospectra correspond to the variances of the signals, while the magnitude of the cross-spectrum corresponds to their covariance.
There are four possible types of relationships between input A and output B:
Perfectly linear relationship


A sufficiently linear relationship with a slight scatters caused by noise


Non-linear relationship


No relationship


Measurement screen - video
Mode indicator function (MIF)
If all parts of a structure move sinusoidally at the same frequency with fixed phase relationships, this motion is referred to as a normal mode. Normal modes occur at resonance or natural frequencies. Depending on the structure, material, and boundary conditions, a number of mode shapes may exist (e.g., twisting, bending, half-period, or full-period movements).
These mode shapes are typically calculated using finite element simulation software and/or identified through experimental modal measurement and analysis.
As mentioned earlier, when the amplitude of a transfer function shows a local maximum and the phase shifts significantly at that point, it typically indicates a resonance. To confirm this, the coherence should also be checked, as previously explained. Finally, the MIF (Mode Indicator Function) can provide additional verification.
In Dewesoft, a MIF value close to 1 strongly indicates the presence of a mode shape.
The spikes shown in the graph below are very likely to correspond to resonance frequencies. Simply click on them to view the associated movement in the geometry instrument.
The MIF function, which has values at all spectral lines, should be displayed using a 2D graph widget.
MIF is calculated from all FRF functions (including all DOFs), which means the result is a single-channel output representing a global resonance indicator.


Note: In other software applications, the MIF is often displayed with valleys at resonance frequencies instead of peaks. In Dewesoft, we use 1 – MIF compared to such software, so that modes are indicated with peaks.
Structure movement animation
The structure movement animation is created by applying sine functions—based on the measured amplitudes and phases—to the points in the geometry model. The animation is performed in a single direction (in our example, Z+). For FRF and Frequency ODS results, you can animate the structure at a specific frequency, which can be selected in the 2D graph by setting the Cursor type to Channel cursor, as shown below.
Note: For Time ODS, the time cursor in the Recorder widgets determines the time instance displayed in the deflection shape animation.


Alternatively, the frequency can also be selected manually in the Modal Geometry widget properties on the left.


Various parameters such as animation speed and amplitude (scale), as well as the visibility of elements (nodes, point numbers, traces, shapes, coordinate system axes), can be adjusted here.
Below are some of the mode shapes of the snowboard, calculated using the DewesoftX Modal Test. The examples clearly illustrate both bending and twisting (torsional) modes.


Modal circle
Finally, when you are certain that the point you are observing is a resonance, you may want to determine its exact frequency and damping factor.
Since the FFT cannot provide high precision alone—because achieving high frequency resolution requires long calculation times, which are not feasible during a hammer impact—mathematical interpolation methods are used.


The Dewesoft Modal Test module includes the circle-fit principle method. This modal circle method is suitable for simple SDOF structures with few, well-separated, and lightly damped modes.
For more complex structures, the Dewesoft Modal Analysis module should be used. It offers advanced modal parameter estimation techniques capable of analyzing complex MDOF structures with many closely coupled and heavily damped modes.
The features of the Modal Analysis module will be described later in this Pro-Training material.
Circle fit analysis procedure
The FFT lines to the right and left of a peak—known as neighbor lines—are represented by their real and imaginary components in the complex coordinate system. A circle is fitted between them with minimal error to each point, and the resonance frequency is approximated.
The geometric interpretation of the formula for the mobility FRF of a damped SDOF system is a plot of Im(Y) versus Re(Y). The image below shows the mobility FRF of a damped SDOF system (Amplitude) on the left and the corresponding modal circle plot on the right.


The selected point on the FRF curve should not be affected by neighboring modes. Ideally, the circle arc should span approximately 270 degrees.


The damping ratio is calculated using a user-defined number of points on the circle, both below and above the resonance peak.


Imagine we have a sample rate of 2000 Hz and 1024 FFT lines, resulting in a line resolution of 0.977 Hz. The peak we are examining appears at 73.2 Hz, but its actual value could lie within the range of 73.2 Hz ± 0.977 / 2 Hz. In the example below, we changed the 2D graph's Graph Type property to Histogram to make the individual FFT lines clearly visible.
Next, we add the Modal Circle from the widget toolbar. When the 2D graph is set to Cursor Mode, the modal circle widget follows the cursor. By clicking on the peak, initially, no resonance peak is detected.


We then increase the Peak Search Range from 10 Hz to 20 Hz. The peak is successfully identified, and by adjusting the Neighbor Count, we can define how many FFT lines to the left and right of the peak are included in the calculation. The selected points should align closely to form a circle. The small red point on the circle represents the calculated result in the Modal Circle widget.

The final result shows a resonance frequency of 72.775 Hz and a damping factor of 0.038. These parameters can be used for further analysis in the Dewesoft Modal Analysis module or exported to other simulation software.
Modal analysis of complex structures
As mentioned at the beginning of this training material, the Dewesoft Modal Test module is used for acquiring structural dynamic test data of objects. It provides calculated FRFs (Frequency Response Functions) and other modal-related function types.
The Dewesoft Modal Analysis module is used in Analyze mode, after the modal test data acquisition, to estimate high-quality modal models. While Dewesoft Modal Test primarily offers tools to determine modal parameters for simple structures—those with light damping and well-separated modes—the Dewesoft Modal Analysis module provides tools to determine valid modal parameters for complex structures, including those with multiple closely spaced resonant frequencies and significant damping.


The Dewesoft Modal Test module is included in the Dewesoft X DSA package (along with other modules such as Order Tracking, Torsional Vibration, etc.).
The Dewesoft Modal Analysis module, however, requires a separate license and is not included in the DSA package.
Why estimate a modal model?
Why should you use the Modal Analysis module to estimate modal parameters instead of relying solely on the values provided by the tools in the Modal Test module? The answer depends on the structure being tested—specifically, whether its dynamic behavior is relatively "simple" or "complex."
SDOF (Single Degree Of Freedom) Fitting
SDOF curve fitting—supported in the Modal Test module—can be effectively used for simple structures with well-separated modes and minimal modal overlap, or in specific frequency bands where such conditions are met. At resonance frequencies, simple structures tend to behave like an SDOF system. For these cases, the Modal Circle widget can be used to extract reasonable estimates for resonance frequencies and damping values.
When structures are lightly damped (e.g., damping < 1%), the modes tend to exhibit small overlaps, meaning the modes are lightly coupled.
MDOF (Multi Degree Of Freedom) Fitting
MDOF curve fitting—available in the Modal Analysis module—should be used for complex structures that exhibit closely spaced modes and heavily damped behavior, which leads to significant mode overlap. MDOF fitting is well-suited for analyzing selected frequency ranges where such characteristics exist or can be applied across the entire frequency range.
Unlike SDOF fitting, MDOF fitting estimates a full modal model that separates overlapping modes. This allows for the accurate extraction of valid modal parameters, even when modes are closely coupled—a capability that SDOF methods do not offer.


Modal parameter estimation
Modal parameter estimation becomes especially important when the measured Frequency Response Functions (FRFs) contain overlapping modes. If modal parameters for complex structures are estimated under the assumption of Single Degree of Freedom (SDOF) systems—using methods such as Modal Circle fitting or quadrature picking—the influence of nearby modes will distort the estimation, leading to inaccurate results.
To accurately estimate the modes of complex structures—where multiple modes are closely coupled—Multi-Degree of Freedom (MDOF) curve fitting is used. This technique optimizes a series of SDOF systems to best approximate the Complex Mode Indicator Function (CMIF). The number of SDOF systems included in the final estimated model corresponds to the number of poles (and thus modes) selected from the Stabilization Diagram.
By expressing a measured FRF—composed of multiple overlapping modes—as a sum of multiple SDOF systems, each mode can be estimated independently, without interference from neighboring modes.
One of the primary parameters in curve fitting is the Order (also known as Iterations or Modal Size), which defines the polynomial order of the fitted mathematical function. The Order must be set high enough to accurately model all modes within the selected frequency range or band. It must also account for the residual effects of modes located outside the fitting range.
However, if the Order is set too high, the fitting function may begin to capture noise as if it were part of the modal structure. This can lead to the identification of non-physical computational modes that do not represent the actual dynamic behavior of the system.
DewesoftX modal analysis setup
To get started with DewesoftX Modal Analysis, add the Modal Analysis module as shown below:


Note: Modal analysis output channels are only calculated after measurements have been acquired, using the related data files in Analyze Mode.
The Modal Analysis Setup window contains a table of added FRF functions on the left side and general settings on the right.


Transfer functions table
In the Transfer Functions table, you must add the measured FRFs you want to use from the Modal Test. This can be done either by clicking Add all TFs, which will import all measured FRFs from the data file, or by clicking Add, which will insert a single row into the table for you to assign an FRF manually.
The measured FRFs that you wish to include in the modal model estimation process should be set to Used → True.
The Transfer Function Preview tab will display the FRFs set to Preview → Enabled (>>), which can help determine the relevant frequency range for the estimation process. The preview also illustrates which modes are present across all FRFs (global modes) and which appear only in one or a few FRFs (local modes).
When performing global mode curve fitting, all FRFs should contain the global modes. Otherwise, the global estimation may be inaccurate.
General settings
Under General Settings, begin by selecting the frequency range for the analysis. You may need to analyze the entire range or focus on a specific frequency band, depending on your objective.
Enable the Damping Correction parameter if you used the Force + Exponential FFT window for the measured FRFs.


Calculations tab
Under the Calculation tab, you can adjust settings for the Stabilization Diagram and specify which output functions you want to include. We will revisit the Stabilization Diagram in the next section.
Max order - Increasing the order of the curve fit will also increase the number of calculated poles to select between in the Stabilization diagram. When the calculated poles begin to only change a little between individual neighbor orders, then the poles are said to be stable.
Frequency tolerance - Defines the limit for how much neighboring poles must deviate in frequency in order to be Frequency stable poles.
Damping tolerance - Defines the limit for how much neighboring poles must deviate in damping to be stable poles with respect to damping.
The Outputs section determines which output functions will be calculated.
Offline means the function is calculated in Analyze mode—as we do when using the Modal Analysis module. A function type will not be calculated if it is set to Unused.
CMIF - Complex Mode Indicator Functions (CMIF), have one function for each reference DOF included (poly reference) and can help identifying closely coupled modes and repeated roots. CMIF is based on Singular Value Decomposition (SVD) of all the Used FRF functions, to identify all modes included in the model test measurements. The CMIF functions have peaks at resonances - indicating poles of the DUT.
FRF synthesis - FRF Synthesis is used as a validation tool by comparing the FRFs from the estimated modal model (the synthesized FRFs) with the real measured FRF data.
Mode shapes - Outputs the mode shapes for the modes selected on the stabilization diagram - based on the estimated modal parameters.
AutoMAC - The Modal Assurance Criterion (MAC) is used to determine the similarity of two mode shapes. "Auto" in AutoMAC means that the two mode shapes comes from the same test.
Stability diagram
You use the Stabilization Diagram (SD) to determine the basis for modal parameter identification. It helps identify stable poles and, consequently, consistent modes that can be used in the modal parameter estimation process.
Poles consist of modal frequency and damping. When the poles appear as green circles, they meet the tolerance criteria for stable frequency and damping, as specified under General Settings in the Modal Analysis setup.

 for modal curve fits and CMIF data (red and orange)")
To estimate a mode, you must select a stable pole for each mode by left-clicking on the corresponding pole. Once the set of poles is selected, press the Recalculate button to begin the estimation process, as shown below:

In the Stabilization Diagram, you can also display the CMIF (Complex Mode Indicator Function) curve(s), which help provide an overview of the detected structural modes while selecting poles.
CMIF is based on Singular Value Decomposition (SVD) of all the Used FRF functions and is used to identify all modes included in the modal test measurements.
The CMIF functions exhibit peaks at resonance frequencies, indicating the poles of the Device Under Test (DUT).
CMIF outputs one function for each reference Degree of Freedom (DOF) included in the analysis.
The Stabilization Diagram can be added to the Analyze → Review display by inserting the widget, as shown below:


Modal model validation
When stable poles have been selected on the stabilization diagram and modal parameters have been calculated, you should validate the quality of the results using the Modal Assurance Criterion (MAC) and by comparing the synthesized FRFs with the measured FRFs. If both the MAC values and synthesized FRFs appear accurate, then you have successfully obtained representative resonance frequencies, damping ratios, and mode shapes for the individual modes of the structure—even if some modes are closely coupled.
AutoMAC
AutoMAC is used to verify whether the selected and estimated modes are distinguishable based on the number of FRFs used. If too few Degrees of Freedom (DOFs) are measured, two different modes might appear to behave similarly at the measured DOF nodes. In such cases, multiple modes may not be distinguishable, and the modal estimation could blend the characteristics of different modes.
To ensure acceptable spatial resolution, a sufficient number of DOFs must be used to capture the unique characteristics of each mode. Additionally, the DOF node positions must be chosen carefully to ensure that the differences between the modes can be detected.
The AutoMAC results range from 0 to 1 for all mode pairs. A value of 1 indicates that the two modes are 100% correlated, while a value of 0 means that the modes have no correlation. In the image below, you see the AutoMAC matrix of a modal model with nine modes. The diagonal elements (e.g., mode 1:1, 2:2, ..., 9:9) will always have a value of 1, since a mode is always perfectly correlated with itself. Conversely, the off-diagonal elements (e.g., mode 1:2 or 3:5) should have values as low as possible, indicating that the estimated modal model is based on data with clearly distinguishable modes.


Synthesized FRFs
FRF synthesis is a validation tool used to compare the Frequency Response Functions (FRFs) from the estimated modal model (the synthesized FRFs) with the actual measured FRF data. This comparison allows you to evaluate how accurately the estimated model mimics the dynamics of the physical structure. If the synthesized FRFs closely resemble the measured FRFs, it confirms that the modes of the structure can be effectively represented by the estimated model. In other words, the structure has been successfully described using a series of Single Degree of Freedom (SDOF) systems with well-defined modal parameters.

 and synthesized (blue) FRF comparison. In this example the modal model is very nicely describing the measured structural dynamics")
Mode shapes
The mode shapes are estimated using the Least-Squares Frequency Domain (LSFD) method. This technique performs localized estimates based on individual FRF measurements, combined with the global modal parameters (frequency and damping) previously estimated by the Multi Degree of Freedom (MDOF) global curve fitter.
Each mode shape is represented as a vector of complex values, with one value for each Degree of Freedom (DOF) point. These complex values describe how the DOFs move relative to each other for a given mode. In the illustration below, the estimated mode shapes of a complex structure are animated. For every identified mode, a corresponding mode shape vector is calculated and used for the animation.
Mode shape animation is a powerful tool for validating how well the estimated modal model describes the measured FRF data. It also helps in comparing the estimated mode shapes with Finite Element Method (FEM) models by visualizing the animations of both measured or simulated FRFs alongside the estimated results.
Export of complex data
After the measurement is complete, the data can be exported to a variety of file formats, such as UNV/UFF, DIAdem, MATLAB, Excel, or text files. The modal data results can be exported separately as real, imaginary, amplitude, or phase components—whichever format you prefer.


In Microsoft Excel, for example, FRF data appears on a sheet labeled Single Value. For each FRF, the real, imaginary, amplitude, and phase components are exported.
If you prefer a different layout, you can easily switch rows and columns in Excel by copying the data and using the Transpose function from the Paste Special submenu.


Export to UNV / UFF format
The Universal File Format (also known as UFF or UNV format) is widely used in modal analysis. Depending on the header content, it can store transfer functions, coherence, geometry, or various other types of data.
The following example demonstrates how to export data recorded with Dewesoft into Vibrant Technologies’ ME'scope analysis software and how to display it there.
First, choose UNV export from the Export section, and enable the option Export complex channels if you wish to include phase, real, and imaginary components. Then, select all your transfer functions (you can use the filter and type TF to simplify the selection). When you click the Export button, a UNV data file will be created.


In the Geometry Editor, the structure can also be exported separately in UNV format, which creates a dedicated UNV geometry file.


UNV files can then be imported into any software application that supports this format (such as ME'scope, N-Modal, etc.). In ME'scope, go to File → Import → Data Block, and select the UNV data file.


The transfer functions will now be displayed.


Then click File -> Import -> Structure and select the UNV geometry file.


Once both the data and geometry have been successfully imported into ME'scope, you can animate the structure. To do this, go to Draw → Animate Shapes.


A pop-up will appear prompting you to match the structure with the transfer function data. Once matched, equations will be generated.




Finally, select a peak in the transfer function and enjoy the animated visualization.


Example - imapct hammer measurement
To gain a better understanding of modal measurement procedures, this section presents a step-by-step guide on how to use the previously mentioned modal test controls and tools.
As an example, let’s analyze the metal sheet structure shown in the picture below. First, we define the direction of analysis (e.g., orientation up/down along the Z-axis), then place the structure on soft rubber foam to allow it to vibrate freely. Alternatively, the plate could be suspended with rubber bands to achieve freer structural vibrations, but for this example, the foam setup is sufficient.
Next, mark the node points on the structure — in our case, from #1 to #24. Increasing the number of Degrees of Freedom (DOF) points improves spatial resolution. If too few DOFs are used, there will not be enough information to accurately describe and animate all mode shapes individually.
It is also helpful to write the node numbers (Node IDs) directly next to the points. These should correspond with the structure layout, the channel setup, and the modal geometry defined in the software.


In this example, we use a roving modal hammer and a single reference response accelerometer to perform a SISO (Single Input, Single Output) modal test. The hammer will strike each node point sequentially, while the accelerometer remains mounted at a fixed location.
Set the sampling rate to 5000 Hz. Assign appropriate names to the hammer and accelerometer in the channel setup and ensure proper sensor scaling. In this case, both the hammer and the accelerometer are IEPE sensor types with TEDS, so their data — including scaling — is automatically managed by Dewesoft. The hammer measures force in newtons (N), and the accelerometer measures acceleration in g.
To manually configure the sensors, go to Channel Setup and enter the sensor configuration under Setup.


In Modal Test setup (MT) choose the Impact hammer Test method and check on Roving hammer/response. Make some test impacts and set the trigger level somewhere below the max value of these impact levels. We will do 4 hits at each point, which are then averaged. The FFT number of lines is set to 1000 giving a window length of 0.4s, and a line resolution of 2.5 Hz.

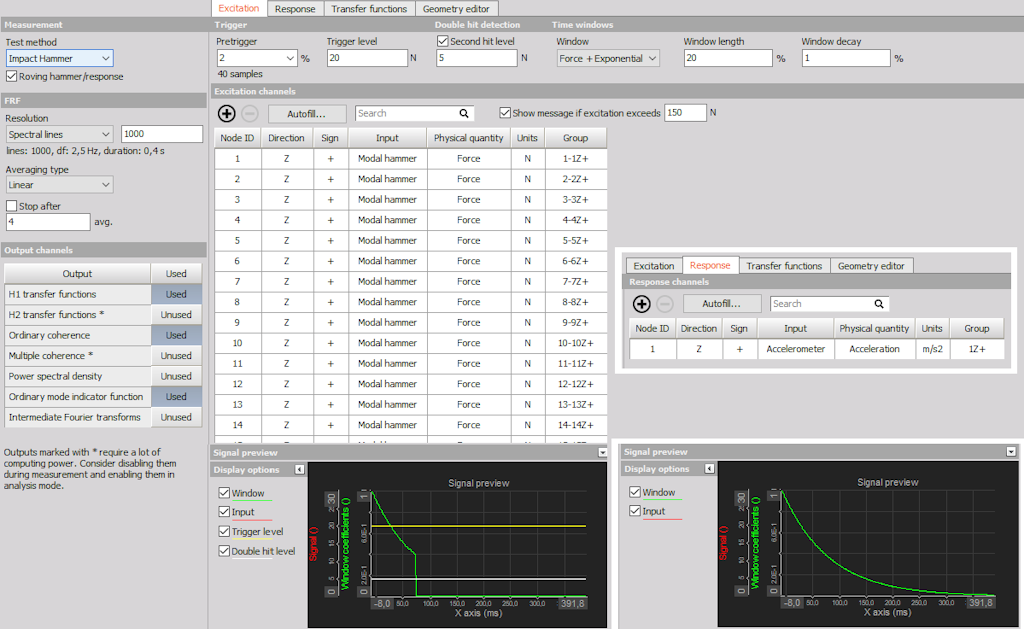
In the Modal Test (MT) setup, select the Impact Hammer test method and enable the Roving Hammer/Response option. Perform a few test impacts and set the trigger level slightly below the maximum value of these impact amplitudes. At each measurement point, we will perform four hits, which will be averaged. The FFT is configured with 1000 lines, resulting in a window length of 0.4 seconds and a line resolution of 2.5 Hz.


Now it's time to perform some test hits to familiarize yourself with the setup. Switch to Measure mode (without starting data storage), and select the predefined MT – Impact Hammer display template. When a test hit exceeds the configured trigger level, the data will be displayed in the graph widget.
As soon as the first DOFs are measured, the structure animation will begin.


o ensure that the FFT block length covers the entire impact and the corresponding output response, refer to the scope displays in the upper-right corner of the display template. If the full impact energy is not captured, the FFT block duration should be increased—either by using a higher line resolution or a lower sampling rate.
Now we are ready to begin the measurement. Start storing data and perform four hits on point #1. The scope and FFT graphs will update after each hit, allowing you to visually check for double hits or poor impacts, which can be rejected. If you accidentally hit the wrong point, you can reset the entire point. Clicking the Next Point button will increment the point number, always showing the current transfer function.
This procedure can also be summarized in a flowchart:


Once all points have been measured, switch to Analyze mode. The most recently stored file will automatically be reloaded. At this stage, you may wish to adjust the screen layout for further analysis. The example screen below illustrates this: it shows the first four transfer functions (TF12-1, TF12-2, TF12-3, TF12-4) with both amplitude and phase graphs. Below, the Mode Indicator Function (MIF) is displayed to help identify mode frequencies. Simply click on the peaks (ensure the widget is in Channel Cursor mode), and in the lower-right corner, the Modal Circle will calculate the exact frequency and damping.


Below are some of the animated mode shapes.


Example - shaker measurement
This is a practical example demonstrating the Shaker Test method. The analog output of a SIRIUS DAQ instrument (Dewesoft AO) is connected to an audio amplifier, which drives a loudspeaker. A metal structure (a metal beam) is mounted on the membrane, using a force transducer for excitation and two accelerometers for measuring the response.


In the Analog In Setup tab, we configure our force sensor and the three accelerometers—all of which are IEPE-type sensors. Since we aim to analyze the structure up to 1000 Hz, we choose a sampling rate of, for example, 5000 Hz.


Next, we add a Modal Test module and select the Shaker Test method. The FFT window size is set to generate 1000 spectral lines, resulting in a frequency resolution of 2.5 Hz. We choose Dewesoft AO as the excitation source, and select the Sine Sweep waveform. The sinusoidal signal is configured to sweep logarithmically from 10 Hz to 1000 Hz. Node IDs are assigned based on the structure, and the Z+ direction is selected for all.


Now, let’s draw a simple geometry by entering the Geometry Editor tab under the Modal Test Setup module.


We are now ready to begin the measurement. When you click the Store button, the function generator will start, and the AO will sweep from 10 to 1000 Hz. The transfer functions will gradually build from left to right. In the snapshot below, you can see the sweep currently at 357 Hz.


Finally, we can review the results. The coherence relative to the excitation looks excellent. The green line (MIF) highlights the mode shapes—click on the peaks to animate the structure.


Page 1 of 38