Sisällysluettelo
Selaa kategorioita
Selaa kirjoittajia
 AL
ALAlessia Longo
 AH
AHAl Hoge
 BJ
BJBernard Jerman
 BČ
BČBojan Čontala
 CF
CFCarsten Frederiksen
 CS
CSCarsten Stjernfelt
 DC
DCDaniel Colmenares
 DF
DFDino Florjančič
 EB
EBEmanuele Burgognoni
 EK
EKEva Kalšek
 FB
FBFranck Beranger
 GR
GRGabriele Ribichini
Glacier Chen
 GS
GSGrant Maloy Smith
 HB
HBHelmut Behmüller
 IB
IBIza Burnik
 JO
JOJaka Ogorevc
 JR
JRJake Rosenthal
 JS
JSJernej Sirk
 JM
JMJohn Miller
 KM
KMKarla Yera Morales
 KD
KDKayla Day
 KS
KSKonrad Schweiger
Leslie Wang
 LS
LSLoïc Siret
 LJ
LJLuka Jerman
 MB
MBMarco Behmer
 MR
MRMarco Ribichini
 ML
MLMatic Lebar
 MS
MSMatjaž Strniša
 ME
MEMatthew Engquist
 ME
MEMichael Elmerick
 NP
NPNicolas Phan
 OM
OMOwen Maginity
 PF
PFPatrick Fu
 PR
PRPrimož Rome
 RM
RMRok Mesar
 RS
RSRupert Schwarz
 SA
SASamuele Ardizio
 SK
SKSimon Kodrič
 SG
SGSøren Linnet Gjelstrup
 TH
THThorsten Hartleb
 TV
TVTirin Varghese
 UK
UKUrban Kuhar
Valentino Pagliara
 VS
VSVid Selič
 WK
WKWill Kooiker
Ruuviliitosten fysikaalisten parametrien tunnistaminen

Carsten Frederiksen && Matteo Di Manno (Rooman Sapienza-yliopisto) yhteistyössä Annalisa Fregolentin ja L'Aquilan yliopiston opiskelijoiden Jacopo Brunettin ja Walter D'Ambrogion kanssa.
November 21, 2024
Useista liitoksilla yhdistetyistä osista koostuvissa mekaanisissa rakenteissa liitoksen tutkiminen on olennaisen tärkeää. Nivelparametrien tunnistaminen mahdollistaa sen, että nivelten vaikutusta kootun järjestelmän dynaamiseen käyttäytymiseen voidaan tutkia. Yksi tunnistusmenetelmä on sellainen, missä toisiinsa liitetyt komponentit erotetaan. Tämä tekniikka edellyttää järjestelmän täyden kokoonpanon ja sen yksittäisten komponenttien taajuusvastefunktioiden mittaamista.
Ryhmä opiskelijoita kahdessa italialaisessa yliopistossa, Rooman Sapienza Yliopistossa ja L'Aquilan Yliopistossa, ryhtyivät kokeilemaan irtikytkentätekniikkaa. He liittyivät mekaanisen värähtelyn ja vibroakustiikan tutkimusryhmiin.
Useimmat mekaaniset rakenteet koostuvat useista komponenteista, jotka on liitetty toisiinsa liitoksilla, kuten ruuviliitoksilla tai naulaliitoksilla. Vaikka liitokset sijaitsevat vain pienessä osassa rakennetta, ne voivat vaikuttaa merkittävästi kootun järjestelmän dynaamiseen käyttäytymiseen.
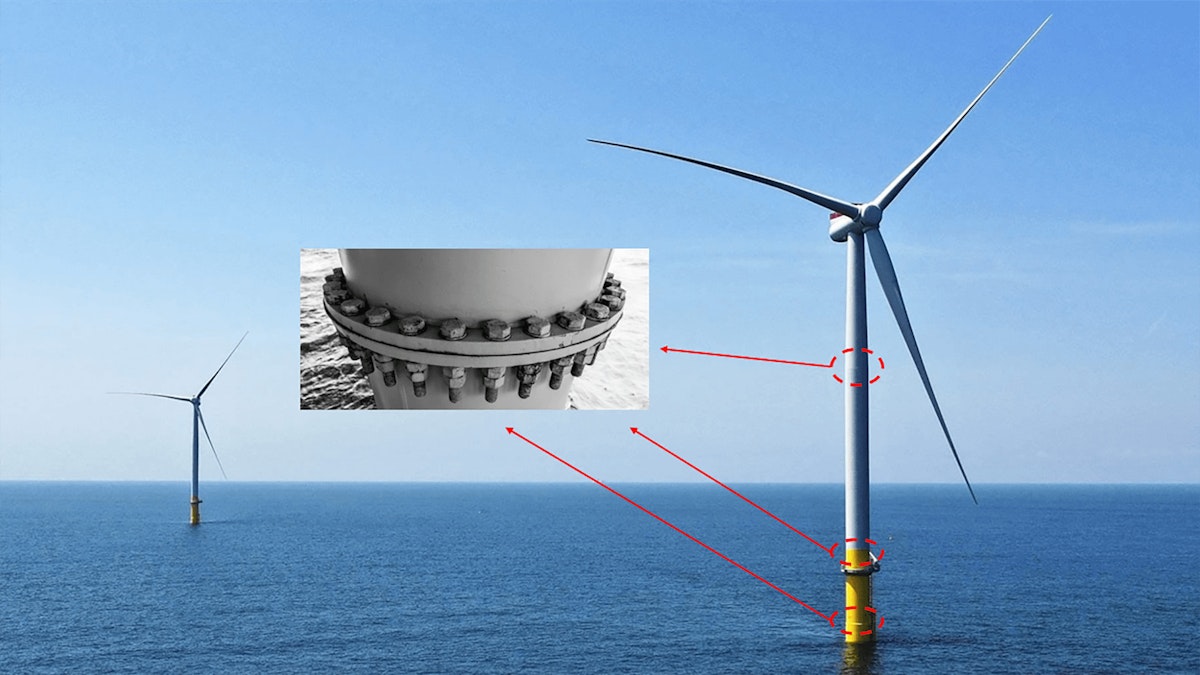
Eräs silmiinpistävä esimerkki ovat ruuviliitokset, jotka voivat muuttaa rakenteen kokonaisjäykkyyttä komponenttien liitosalueella. Tämän seurauksena kootun järjestelmän ominaistaajuudet vaihtelevat käyttöolosuhteista riippuen. Tämä on havaittu esimerkiksi tuuliturbiinien torneissa.
Mekaanisten liitosten vaikutuksen tutkiminen kootun järjestelmän dynaamiseen käyttäytymiseen on siksi erittäin tärkeää. Aloitetaan kuvan 1 kaltaisen yksinkertaistetun järjestelmän analysoinnista.


Yhteinen tunnistaminen irtauttamalla
Yksi käytetyimmistä nivelten tunnistamismenetelmistä on dynaaminen osajärjestely, erityisesti irrotusmenetelmä. Rakennejaon purkamisessa koottu rakenne kasataan useisiin toisiinsa kytkettyihin osajärjestelmiin.
Tarkastellaan esimerkiksi koottua rakennetta, jossa ruuviliitos yhdistää kaksi komponenttia (ks. kuva 2). Tämä liitetty rakenne voidaan jakaa kolmeen osajärjestelmään, kahden komponentin osajärjestelmiin A ja B sekä kolmanteen osajärjestelmään, joka edustaa ruuviliitosta J. Kytkennän avulla voidaan tunnistaa liitetyn osajärjestelmän J dynaaminen käyttäytyminen ja poistaa kootun järjestelmän AJB dynamiikasta osajärjestelmien A ja B dynamiikka erikseen mitattuna.


Jotta liitos voidaan tunnistaa irrotuksen avulla, on mitattava kootun rakenteen ja yksittäisten komponenttien osajärjestelmien taajuusvastefunktiot (FRF). FRF määritellään vasteen ja herätteen väliseksi suhteeksi herätetaajuuden funktiona.
Kokeellinen soveltaminen
Kokeessamme käytimme irrotusta ruuviliitoksen tunnistamiseen. Kirjallisuudessa tämä tunnetaan Brake Reuss Beam -nimellä. Kyseessä on kaksi teräspalkkia, jotka yhdistetään keskijänteestä kolmella pultilla.


Kootun järjestelmän ja yksittäisten palkkien taajuusvastefunktiot mitattiin DewesoftX-ohjelmiston Modal Testing -lisäosalla.
Tämä lisäosa sisältää tärkeimmät työkalut FRF:ien hankkimista varten, ja siinä on mahdollisuus näyttää FRF:t ja koherenssi reaaliajassa, jotta tuloksena olevaa laatua voidaan arvioida mittauksen aikana. Lisäksi lisäosalla voidaan poimia tietoja testatusta rakenteesta, kuten ominaistaajuudet, vaimennus ja modaaliset muodonmuutokset.


Määritimme 42 herätepisteen ja 42 mittauspisteen avulla kootun järjestelmän taajuusvastefunktiot. Käytimme SIMO (Single Input-Multi Output) -testimenettelyä, jossa rakenne herätettiin modaalivasaralla (PCB 086C03) ja mitattiin kiihtyvyys seitsemässä eri pisteessä yksiakselisilla kiihtyvyysmittareilla (PCB 352A24).
Voima ja kiihtyvyys tallennettiin Dewesoft SIRIUSi -tiedonkeruujärjestelmällä, jossa on kahdeksan analogista kanavaa ja joka perustuu DualCoreADC®-tekniikkaan, jossa on kaksinkertainen 24-bittinen analogi-digitaalimuunnin.
Kunkin analogisen kanavan anti-aliaksointisuodattimen avulla saavutettiin 160 dB:n dynaaminen alue ajassa ja taajuudessa 200 kHz:n näytteenottotaajuudella. Tässä tapauksessa käytimme 5000 Hz:n näytteenottotaajuutta mitataksemme FRF:n 0-1400 Hz:n alueella.
Sovelsimme Modal Testing -liitännäisessä käytettävissä olevaa roving hammer -tekniikkaa kaikkien taajuusvastefunktioiden mittaamiseen. Kun seitsemän kiihtyvyysanturien sijainnit oli vahvistettu, kopautimme rakennetta kaikissa 42 herätepisteessä. Tämä menettely toistettiin siirtämällä kiihtyvyysanturien paikkoja mittausta keskeyttämättä.
Modal Testing -liitännäisen avulla pystyimme myös analysoida tehtyjä mittauksia jälkikäsittelyvaiheessa. Kuvassa 5 on esitetty joitakin kootusta järjestelmästä mitattuja FRF:iä.


Kun olimme mitanneet myös yksittäisten komponenttipalkkien FRF:n, oli mahdollista tunnistaa liitoksen massa- ja jäykkyysparametrit soveltamalla irrotusmenetelmää. Löysimme esimerkiksi kokonaisjäykkyyden arvoksi 9,4e9 N/m ja kosketusjäykkyyden arvoksi 3,1e10 N/m keskipultin kohdalla.
Johtopäätökset
DewesoftX:n modaalitestauslaajennuksen avulla irrotussovelluksessa pystyttiin hankkimaan suuri määrä taajuusvastefunktioita lyhyessä ajassa. Pystyimme tähän ohjelmistorajapinnan yksinkertaisuuden ja roving hammer -tekniikan käyttömahdollisuuksien sekä FRF:n reaaliaikaisen näyttämisen ansiosta. Ohjelmiston ja liitännäisohjelman yhdenmukaisuuden ansiosta pystyimme myös tarkistamaan mittausten paikkansapitävyyden välittömästi.